 |
 |
RESCUE
Cooperative
Navigation
for Rescue Robots
|
|

|
| The Project RESCUE carried out at the Institute for Systems and Robotics will endow a team of outdoors robots with cooperative navigation capabilities, so as to demonstrate the ability of the robots to act individually and cooperatively in search and rescue-like operation scenarios. Search and Rescue
(SAR) operations are a challenging application for Robotics since, due to their nature, they naturally foster advances in Artificial Vision, Navigation in outdoors unstructured environments, Distributed Artificial Intelligence and Intelligent Control. |
| This web page addresses mainly the development
on the Land
Vehicle of the RESCUE project: Localization and Map Building. |
iRobot ATRV-Jr
- 55 X 77.5 cm - 50 Kg
- Payload: 25 Kg
- Onboard Pentium III, Wireless
Ethernet IEEE 802.11b
- 17 sonars
- SICK Laser LMS
- Pan and Tilt camera Sony EVI-D31
12x optical zoom
- Inertial Sensors
- Electronic Compass
- GPS
- 4-wheel differential drive, 2
servo DC motors
- 3-6 hours autonomy
|
 |
Photos and Videos:
Experimental Results:
| Indoors
experience: from a room to a corridor Sensors: Laser, sonars, odometry (only velocity) and video (only for
ilustration)
|


|
Outdoors
experience: in a garden
Sensors: Laser, sonars, odometry (only velocity) GPS,
Inertial, compass and video
|


|
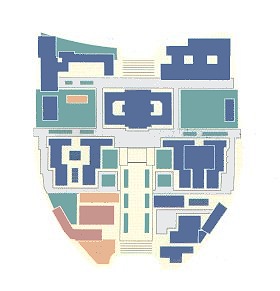
Outdoors
/ Indoors experience: a building entrance
Sensors: Laser, sonars,
odometry (only velocity), GPS, Inertial, compass and video
- experience
includes more photos and datashow (laser and
sonar)
|


|
Outdoors experience:
@ IST campus (Alameda)
Sensors: Laser, sonars,
odometry (only velocity), GPS, Inertial, compass and video
|
|
Outdoors experience:
@ Palácio de Cristal - Pavilhão Rosa Mota (Porto)
Sensors: Laser, sonars,
odometry (only velocity), GPS, Inertial, compass and video.
The robot moved autonomously (reactive navigation)
|
 |
Indoors experience:
3D reconstruction using a second Sick Laser
The results are presented using VRML, which requires an appropriate pluggin for your browser.
experience (with different combinations)
|
 |
|