|
|

RESCUE
|
|
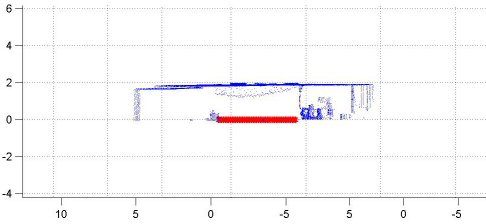
The ATRV-Jr was equipped with a Sick Laser LMS 200 for, mainly, obstacle avoidance.
A second Sick Laser was plugged to make some experiences. And the results are interesting!
The Sick Laser is prepared to make a vertical scan with 180 or 360 points, correspoding to increments of 1º or 0.5º, respectively.
|

|
|
The results were ploted in Matlab, just using sensor fusion: odometry and Laser, witout any type of filtering.
To explore the results on the web it was used the VRML language, which requires an appropriate plugin for your browser.
There are several VRML pluggins available on the web. I use this one: Cortona VRML Client, www.parallelgraphics.com.
|
|
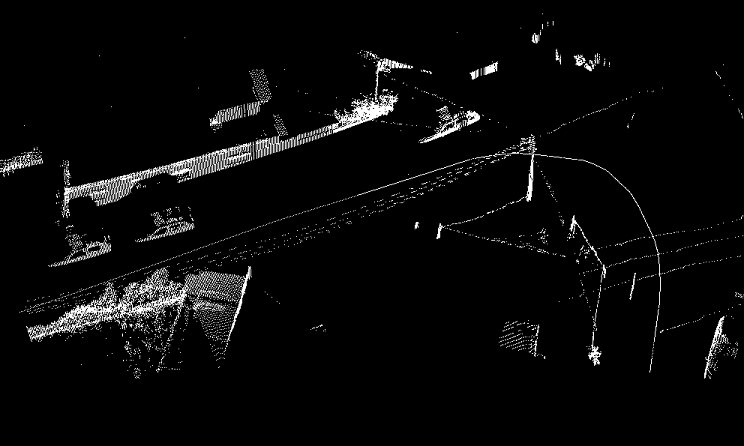
The first and second experiences were acquired inside the Mobile Robotics Lab (LRM).
On the first experience each scanning line contains 180 points, while the second 360 points.
Given the quality of the measurements, it was tested if it is possible to identify a wire plugged on the roof.
Outdoor results


|