Experience 1 - outdoors:Palácio de Cristal - Porto
RESCUE
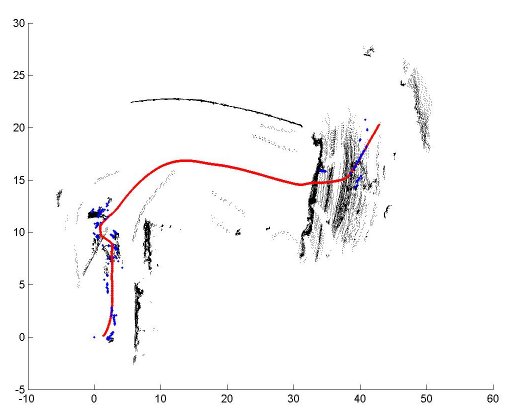
The robot was autonomous (only reactive navigation with no via points).
Using only odometry, laser and sonars without any type of map building algorithm
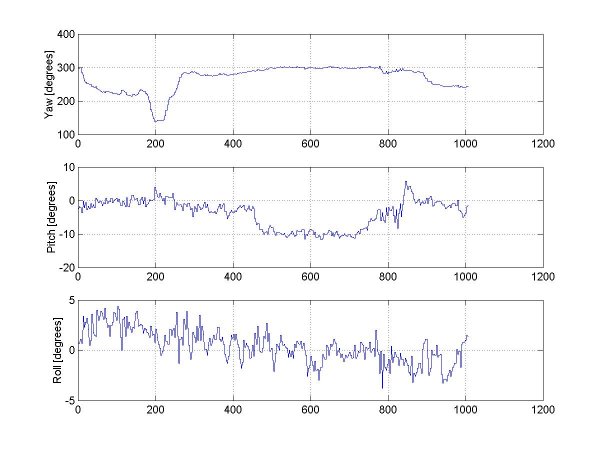
Inertial sensors measurements
Copyright 2004