|
|
©1999 João Gomes Mota, Maria Isabel Ribeiro |
ISR/IST Laboratório de Robótica Móvel |
|||||
|
|||||||
|
|
©1999 João Gomes Mota, Maria Isabel Ribeiro |
ISR/IST Laboratório de Robótica Móvel |
|||||
|
|||||||
Os sistemas de aquisição do projecto RESOLV, variam de acordo com as as tecnologias disponíveis em cada fase do projecto, as aplicações finais e as especificações de cada tipo de protótipo.
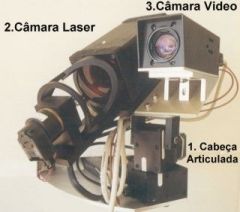
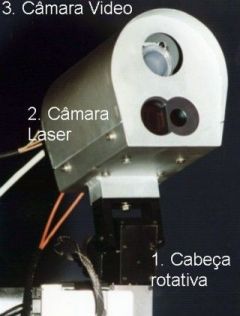
| Há três famílias de robots de aquisição: o carrinho manual (Fig. 3) que é autónomo no sentido em que transporta as suas próprias baterias, está ligado à rede Internet por um sistema sem fios e é operado por uma pessoa; o tripé, que é uma versão simplificada do anterior, ligado à rede eléctrica e à Internet com cabos e o robot móvel autónomo AEST (Fig. 4) que pode ser operado remotamente ou localmente como um carrinho. O AEST engloba toda a tecnologia e programas criados no âmbito do projecto RESOLV. O sistema de aquisição é comum a todos eles (ver na Fig. 11 o AEST): uma cabeça articulada (1) sobre a qual se monta uma prateleira onde estão uma câmara laser (2) e uma câmara de video a cores convencional (3) . Os três elementos principais, em especial o laser, variam entre os vários sistemas e o posicionamento geométrico entre eles também (vide Fig. 12 para o EST). |
|
| Isto resulta da permanente evolução da electrónica e da robótica associada, o que levou o Projecto a acompanhar a saída de novas gerações de sensores e a adaptar os sistemas de aquisição em conformidade. Actualmente o projecto utiliza câmaras laser de duas origens: Acuity Research Inc. (AEST) e Riegl GmbH (EST). O controlo e processamento de dados é feito no computador principal, um computador PC topo de gama equipado com as placas de aquisição e controlo dos vários dispositivos. As especificações deste computador variaram também ao longo do tempo, acompanhando a saída de computadores mais rápidos e poderosos. Além destes elementos principais existem ainda as unidades de transmissão Internet via rádio, as fontes de alimentação e controladores das câmaras e da cabeça articulada e as baterias. |
| Os elementos atrás indicados são comuns a todas as configurações. A configuração do AEST inclui uma plataforma móvel que transporta todo o material acima descrito. A plataforma móvel (Fig. 13), fabricada e equipada pela RoboSoft [1] dispõe de duas rodas motrizes, um anel de sensores de ultra-sons para detecção de obstáculos, as baterias para alimentação de todo o AEST e um computador dotado de um sistema operativo específico para controlo dos movimentos da plataforma. Estão também ligados à plataforma sensores de colisão, os aparelhos de medida de deslocamento, os conversores de tensão para alimentação das câmaras, etc... |
A comunicação entre os dois subsistemas estabelece-se através de duas linhas série por onde "descem" (do PC para a plataforma) os comandos de movimento e "sobem" os resultados dos movimentos e o perfil dos obstáculos em torno do robot. É possível ainda mudar o programa de navegação na plataforma móvel, bem como operá-la manualmente passo a passo, ou dar-lhe comandos de emergência.
A utilização de dispositivos de aquisição diversos permitiu maximizar a cada instante os meios técnicos disponíveis, ao mesmo tempo que se estudava as vantagens e inconvenientes de cada solução. Por outro lado a concepção de um sistema onde os componentes são substituíveis com um esforço reduzido por outros de fabricantes diferentes, abre as melhores perspectivas para a permanente actualização dos robots de aquisição, o que é da maior importância nesta área de trabalho.
Actualmente estão em operação dois protótipos do tipo AEST (Fig. 4), um carrinho manual tipo EST (Fig. 3) e dois tripés usando lasers diferentes.
|
|
|
|||||||||
| |
|
|
|
|
|
|---|---|---|---|---|---|
| ©1999 LRM, Maria Isabel Ribeiro, João Gomes Mota | 12-Junho-1999 | ||||