Introdução
Esta ideia não é original. Aliás, a construção deste carrinho inspira-se num modelo apresentado em LEGO on my mind e na primeira parte desta página apresento um modelo que é uma cópia quase exacta do original. Vim mais tarde a descobrir que o princípio de funcionamento está também muito bem descrito no Capítulo 5 do livro The Unofficial Guide to LEGO Mindstorms, secção "Directional Transmission". Recomendo vivamente estas duas referências mas ainda assim vou tentar explicar o princípio (pelo menos é uma referência em Português).
Com base num primeiro protótipo, construí então o carrinho motorizado, que será descrito na segunda parte. Mecanicamente é igual ao anterior, mas dá muito mais prazer para brincar. Como corolário, juntei-lhe o taquímetro/conta-quilómetros #5206 e medi a estonteante velocidade de 4.12 Km/h em vazio e 2.55 Km/h em carga, usando quatro pilhas alcalinas recarregáveis e garantindo um mínimo de estabilidade.

Primeira Parte: o carrinho manual (copiado de LEGO on my mind)
A construção do carrinho é muito simples (siga o link de cada uma das imagens pequenas à esquerda para ver uma imagem maior).
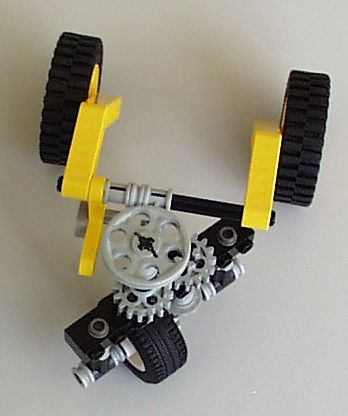
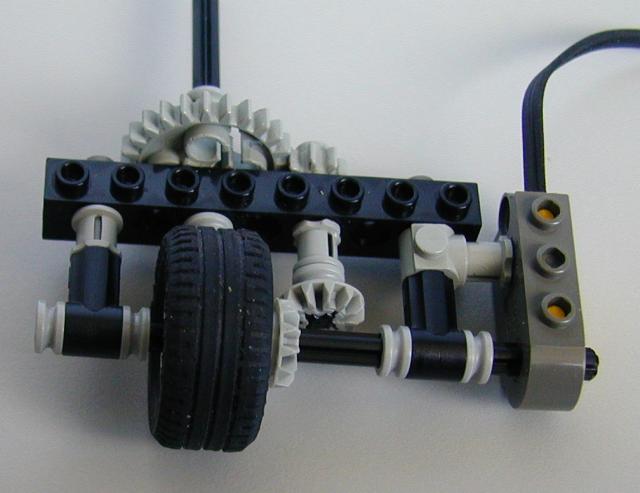
Um eixo de 10u (unidades LEGO) une duas barras oblíquas amarelas com a forma 3+(1)+5 onde (1) representa o ponto do ângulo. No outro extremo estão duas rodas maciças; são as rodas traseiras que rodam livremente.

O volante serve de ilustração para o princípio de funcionamento da tracção. A transmissão faz-se por duas rodas dentadas de 16t (t de teeth), um eixo de 5u na ligação volante-roda dentada e um eixo de 4u na ligação roda dentada-transmissão perpendicular para a roda tractora.
Escolhi uma roda tractora com pneu para melhorar a aderência em superfícies lisas, por exemplo, madeira envernizada ou superfícies sintéticas não porosas.
Ao rodar o volante, o movimento é transmitido aos eixos verticais e, por atrito, faz rodar igualmente a barra horizontal preta de 8u.
Ao rodar o volante para a direita, a barra preta de 8u bate na peça amarela em L, mantendo a barra preta paralela ao eixo traseiro. Como a roda tractora é solidária com a barra preta, o carrinho desloca-se para a frente enquanto o volante continuar a ser rodado para a direita.
Ao rodar o volante
para a esquerda, a barra preta de 8u roda até ficar perpendicular ao eixo traseiro. O seu movimento é limitado pela peça cinzenta. O comprimento desta peça é importante para garantir que o ângulo entre as duas orientações limite é aproximadamente 90º. De outra forma a rotação seria acompanhada de alguma translacção. Com a roda tractora perpendicular ao eixo traseiro, o carrinho roda sobre si mesmo
para a esquerda e assim continuará enquanto o volante fôr rodado para a esquerda.
Concluindo, o carrinho pode rodar para a esquerda e avançar com um só controlo. Não pode é rodar para a direita ou recuar. Mas chega a qualquer ponto do espaço rodando sobre si próprio até encontrar a boa direcção e depois avançar até ao destino.
Maravilhas do atrito e de um batente...

Segunda parte: o carrinho motorizado
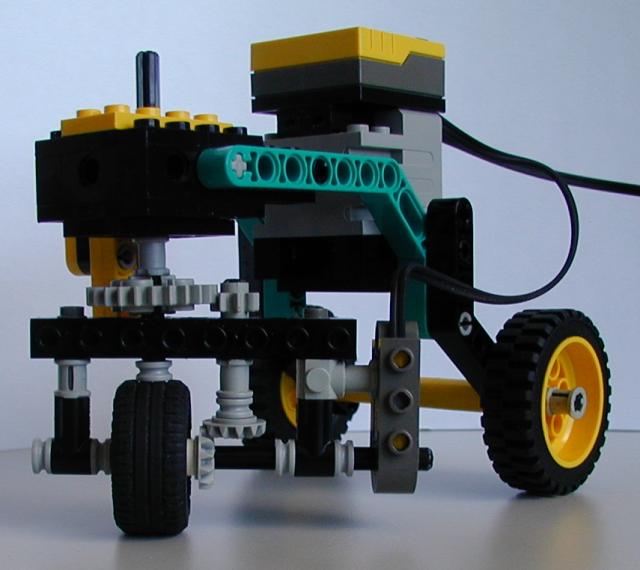
A mecânica do carrinho motorizado é semelhante à anterior. O volante é substituído por uma transmissão a um motor eléctrico. Esta transmissão está encerrada numa caixa para conferir rigidez ao conjunto.
Ao criar um modelo LEGO, é importante estudar a distribuição de massas para garantir a estabilidade. Note-se que o centro de gravidade deste modelo é muito alto porque o motor está montado no cimo do carrinho. Para fazer um modelo mais estável, seria necessário rebaixar o motor usando uma nova transmissão ou aumentar o comprimento do carrinho.
Como pretendo apenas ilustrar um princípio de funcionamento, acho que
assim ficará mais claro.


Design
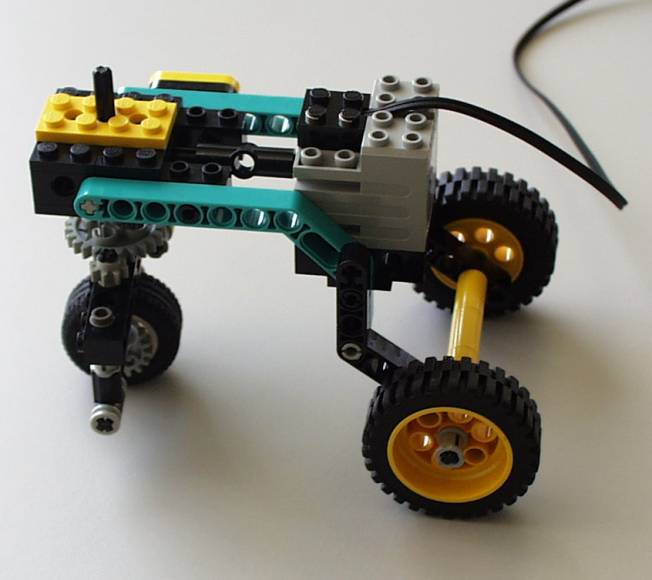
A montagem do chassis é semelhante à anterior. Nas fotografias à esquerda encontram-se imagens das vistas principais do carrinho
Nota: nas imagens subsequentes inclui-se o o taquímetro/conta-quilómetros #5206.
Foi necessário aumentar a dimensão do carrinho para encaixar o motor no seu interior. Colocou-se o motor em posição central para reduzir o braço do momento de rotação do motor relativo à roda motriz, por ser esta a maior causa de instabilidade no arranque e travagem, especialmente em curva.
Também para aumentar a estabilidade as rodas traseiras passivas foram colocadas com um eixo baixo, atrás do motor. Com esta solução conseguiu-se minimizar as probabilidades de "capotamento", embora ao travar e acelerar subitamente em curva, uma das rodas traseiras possa ficar momentaneamente no ar.
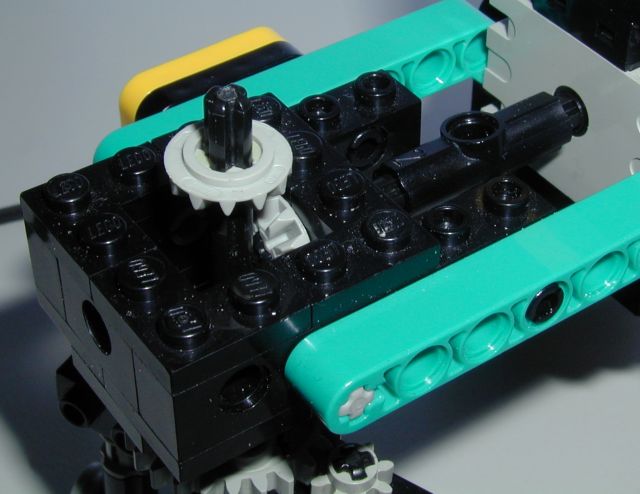
A transmissão é assegurada por um cruzamento de dois eixos perpendiculares, encerrado na caixa negra na frente do veículo (sobre a roda motriz). A transmissão foi alterada, usando-se agora uma roda de 32t ligada ao motor e uma roda de 8t ligada à roda. Consegue-se assim uma relação de 1:4 (a roda faz quatro vezes mais revoluções do que o motor). O eixo motriz é idêntico ao do primeiro carrinho.


Também o batente que fixa as duas posições perpendiculares da roda dianteira é semelhante ao do primeiro carrinho, mas com uma fixação diferente. As imagens à esquerda ilustram o eixo motriz apoiado no batente nas duas direcções ortogonais: na primeira imagem o carrinho avança, na segunda roda para a direita (no sentido dos ponteiros do relógio).
A métrica da montagem não é a mais perfeita mas ilustra satisfatoriamente o princípio mecânico descrito, como se verá em seguida.
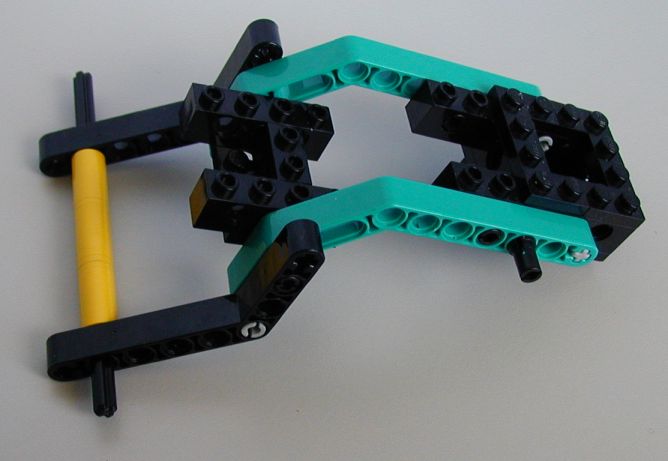
O châssis
A estrutura do châssis é formada por uma barra oblíqua negra 3+(1)+5, ligada a uma barra verde 2+(1)+2+(1)+6. O motor fica montado na zona central, a roda motriz apoia-se na caixa instalada à frente e as rodas passivas são postas atrás.
No ponto de união das duas barras monta-se um berço com uma placa 2x4u, duas peças de 4u e uma peça de 2u para dar rigidez na zona central. Por cima deste berço montar-se-á o motor que tem dimensões 4x4u.
O eixo traseiro é formado por um eixo de 12u, que se enfia no penúltimo orifício das peças negras para que este eixo fique à altura da roda dianteira. Como estas rodas são livres (não têm o entalhe do eixo) é necessário colocar um terminador de eixos para que elas não caiam. Por razões estéticas e de rigidez do conjunto, enfiam-se três tubos amarelos de 2u no eixo traseiro.
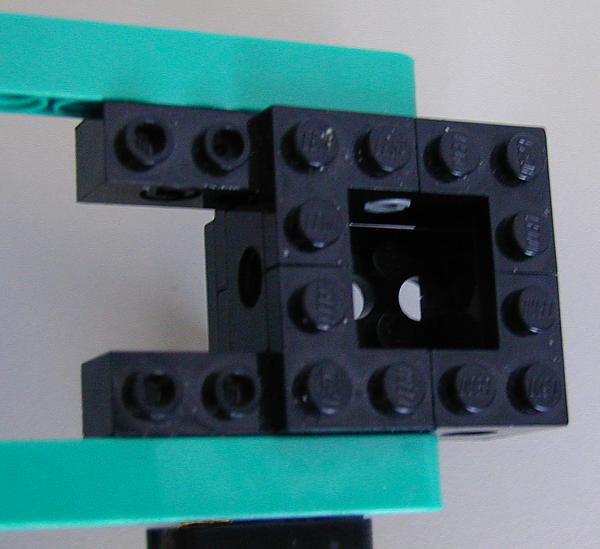
A caixa dianteira, onde será encerrada a transmissão na perpendicular, é formada por duas peças de 6u, duas peças de 2u que se ligam por meio de 8 placas em L de 3u (quatro em cima e quatro em baixo). O fecho da caixa é assegurado por duas placas perfuradas de 2x4u que definem a posição do eixo vertical, deixando-o rodar livremente. A ligação da caixa ao châssis é assegurada pelas peças de 6u, unidas em dois pontos de cada lado.
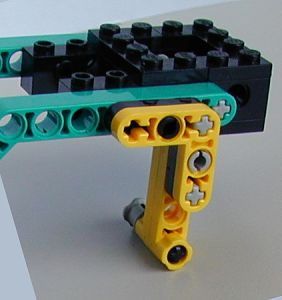
O batente é formado por duas barras finas em ângulo recto, que são fixas em dois pontos da barra verde à direita do châssis. Estas barras são depois prolongadas por mais duas barras de 4u e unidas por um eixo de 3u com um terminador. Dado que esta é a peça que sofre forças bruscas mais fortes é importante que fique rigidamente ligada ao châssis.
A transmissão
O motor apoia-se no berço central. Note-se que o berço é rotativo e que o motor só fica fixo quando o seu veio for ligado à transmissão.
O veio do motor é prolongado até à caixa com uma união de tipo 2 e um eixo de 3u, que entra já na caixa. Este eixo é ligeiramente mais curto do que o necessário e por isso os eixos não devem ser empurrados até ao fim dentro da união (um eixo de 4u é demasiado comprido e cortar-lhe um pouco seria para muitos um sacrilégio).
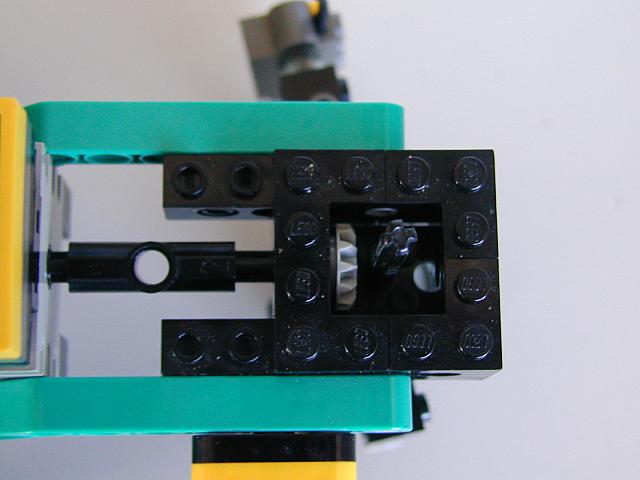
Dentro da caixa faz-se a união dos dois eixos perpendiculares usando duas rodas dentadas de 12t, próprias para o efeito.
Depois de ligados os dois eixos a caixa fecha-se com a placa perfurada amarela de 2x4u para aumentar a rigidez das posições dos dois eixos. Apesar de todos os cuidados, a transmissão é o ponto mais frágil do carrinho e será necessário abrir a caixa ou acertar a união tipo 2 para restaurar a transmissão. Note que os dois eixos que se encontram na caixa não devem tocar-se, por isso o ajuste do eixo de 3u dentro da união tipo 2 é particularmente melindroso.
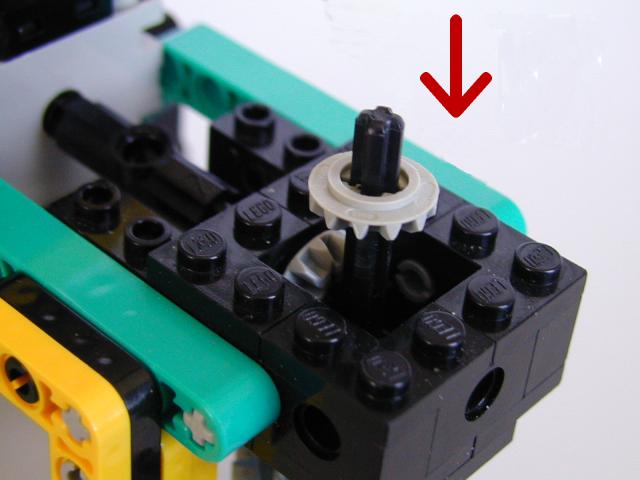
O eixo vertical é de 8u e está ligado à roda motriz por uma roda dentada de 32t.
A jusante da roda de 32t está a roda de 8t que se liga à roda motriz. A parte inferior do eixo motriz é igual à do primeiro carrinho, com excepção das alterações decorrentes do sensor do taquímetro, a saber: a substituição de um eixo de 8u por outro de 10u e a substituição do terminador de eixo no lado do sensor por uma junção de dois eixos.

Ensaios práticos
Seguindo o link da imagem à esquerda pode visualizar um pequeno filme de demonstração em formato MPEG-1 (6 segundos, 397 Kb). A quadrícula no pavimento de cortiça tem 0.3m de lado e a velocidade do carrinho no filme é aproximadamente real.
Conclusão
Faço votos que estas instruções permitam ao leitor a experiência do princípio "1 motor = 2 direcções" e lhe ofereçam algumas horas de divertimento e prazer de fazer LEGO. Em caso de dúvida, contacte-me.